Biography
I am a doctoral researcher at the Robotic Systems Lab, ETH Zurich, supervised by Prof. Marco Hutter, and a Software Engineer at NVIDIA where I am a core developer of Isaac Lab — a GPU-accelerated open-source framework for robot learning used across industry and academia.
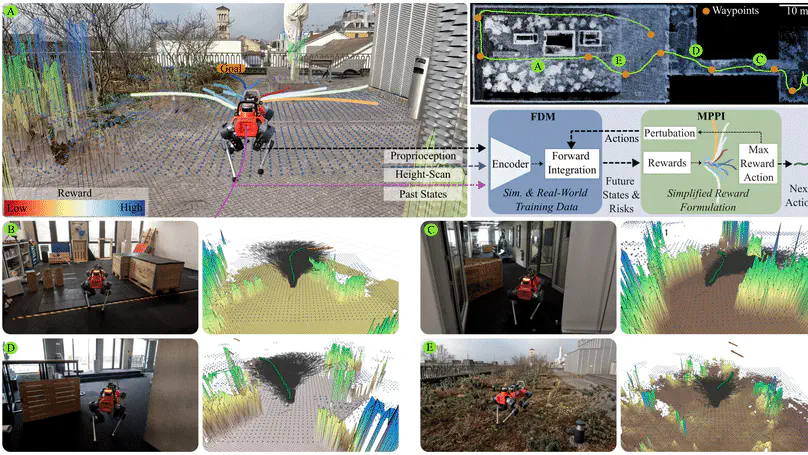
My research focuses on learning-based navigation and autonomy for legged robots, with particular interest in perceptive planning, forward dynamics models, and sim-to-real transfer. I develop methods that allow robots to reason about physical interactions with complex terrain, enabling safer and more capable autonomous navigation in unstructured environments.
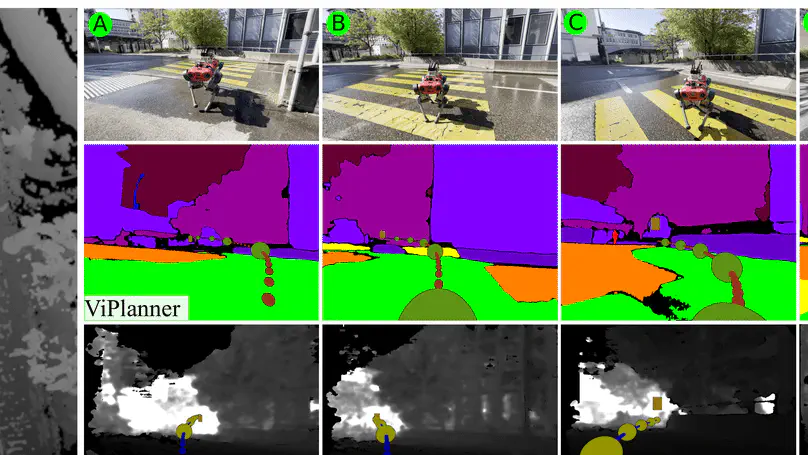
Prior to my PhD, I completed an M.S. in Mechanical Engineering at ETH Zurich (GPA: 5.70/6), where my thesis introduced ViPlanner — a visual-semantic local navigation framework demonstrating zero-shot sim-to-real transfer on ANYmal. I also hold a B.S. with Honours from TU Darmstadt.
- Robotic Navigation & Autonomy
- Robot Learning (RL / Imitation)
- Simulation & Sim-to-Real Transfer
PhD in Robot Learning
ETH Zurich
MSc in Mechanical Engineering, 2023
ETH Zurich
BSc in Mechanical Engineering, 2020
TU Darmstadt
Experience
Education
Recent Publications
Projects




Contact
- rothpa@ethz.ch
- Leonhardstrasse 21, Zurich, 8092
- Message Me